8 800 350 07 67
robomatic@alfamatic.ru



You are here
Комплекс Robomatic F410/450
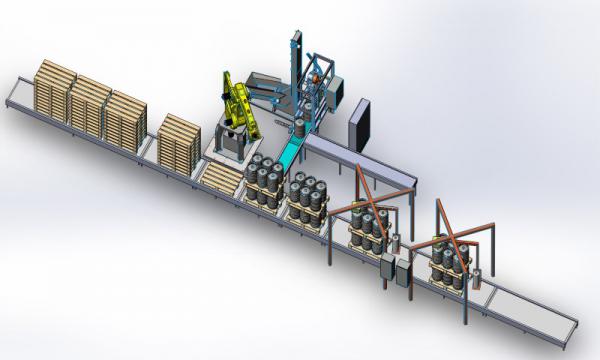
состав комплекса
в состав комплекса Robomatic вошли: промышленный робот, захват с возможностью поиска и захвата паллет, загрузчик крышек, обмотчики паллет ПП-01/25, шкаф управления с тач панелью. Специально для комплекса была спроектирована машина комби, совмещающая в себе функции накидывания и прижима крышки, печати этикетки, выходного контроля с помощью технического зрения и выдачи кег.
Логика работы комплекса
- комби машина:
Кеги с имеющихся машин розлива поступают по входным транспортерам в комби машину. Машина осуществляет накидывание и прижим крышки, печать и наклеивание этикетки с текущей датой, с помощью камеры технического зрения осуществляется отбраковка продукции. Готовая кега выходит в позицию для забора роботом, отбракованная кега выводится на транспортер брака, для ручной обработки.
- Промышленный робот:
С помощью установленных на захвате датчиков робот осуществляет поиск верхней паллеты в стеке, производит захват и перемещение паллеты в позицию для паллетирования. Во время поиска и перемещения паллеты, на транспортере забора кег накапливаются кеги с комби машины. После установки паллеты робот составляет подготовленный слой кег на паллету. Операция повторяется для второго этажа.
- Система транспортеров:
Пустые паллеты составляются на входящий транспортер и автоматически подъезжают по мере разбора стеков роботом. Составленные паллеты с кегами автоматически перемещаются к свободному паллетообмотчику. После осуществления обмотки готовые паллеты транспортируются на выходной транспортер, откуда забираются с помощью кары на склад.
- Паллетообмотчики:
Паллетообмотчики работают в полуавтоматическом режиме, оператор крепит стрейч пленку к паллете, нажимает кнопку запуска обмотки, после завершения обмотки обрезает пленку и нажимает кнопку готовности. Каждый паллетообмотчик имеет собственный контроллер, с возможностью независимой работы друг от друга и настройки рисунка и количества витков.
Роботы:
Fanuc M-410ib
Задача:
Обеспечить независимость производства от грузчиков. Осуществить паллетирование кег с существующих линий розлива, печать этикетки, накидывание крышки, выходной контроль, обмотку паллет стрейч пленкой.
Объект:
Борихинский пивзавод



